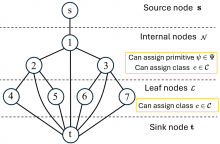
Learning Optimal Signal Temporal Logic Decision Trees for Classification: A Max-Flow MILP Formulation Tags: Temporal Logic InferenceDecision TreesSignal Temporal LogicMixed Integer Linear ProgrammingMachine Learning Read more about Learning Optimal Signal Temporal Logic Decision Trees for Classification: A Max-Flow MILP Formulation
Optimal Control Synthesis with Relaxed Global Temporal Logic Specifications for Homogeneous Multi-robot Teams Tags: Multi-Robot SystemsMulti-Agent SystemsUser PreferencesTemporal RelaxationTime-Window Temporal LogicLinear Temporal LogicMixed Integer Linear ProgrammingAutomata Read more about Optimal Control Synthesis with Relaxed Global Temporal Logic Specifications for Homogeneous Multi-robot Teams
An Iterative Approach for Heterogeneous Multi-Agent Route Planning with Temporal Logic Goals and Travel Duration Uncertainty Tags: Multi-Robot SystemsMulti-Agent SystemsSignal Temporal LogicVehicle Routing ProblemChance-ConstraintsMixed Integer Linear ProgrammingIterative Methods Read more about An Iterative Approach for Heterogeneous Multi-Agent Route Planning with Temporal Logic Goals and Travel Duration Uncertainty
Energy-Constrained Active Exploration Under Incremental-Resolution Symbolic Perception Tags: Control SynthesisActive ExplorationPerception-AwareIncremental Symbolic PerceptionAutomataMixed Integer Linear ProgrammingGround Robotics Read more about Energy-Constrained Active Exploration Under Incremental-Resolution Symbolic Perception
Preferences on Partial Satisfaction using Weighted Signal Temporal Logic Specifications Tags: Formal MethodsSignal Temporal LogicWeighted Signal Temporal LogicPartial SatisfactionMixed Integer Linear ProgrammingMulti-Robot Systems Read more about Preferences on Partial Satisfaction using Weighted Signal Temporal Logic Specifications
Mixed Integer Linear Programming Approach for Control Synthesis with Weighted Signal Temporal Logic Tags: Control SynthesisSignal Temporal LogicWeighted Signal Temporal LogicMixed Integer Linear Programming Read more about Mixed Integer Linear Programming Approach for Control Synthesis with Weighted Signal Temporal Logic
Rewrite-Based Decomposition of Signal Temporal Logic Specifications Tags: DecompositionMulti-Agent SystemsMulti-Robot SystemsSignal Temporal LogicVehicle Routing ProblemMixed Integer Linear Programming Read more about Rewrite-Based Decomposition of Signal Temporal Logic Specifications
Planning for Heterogeneous Teams of Robots with Temporal Logic, Capability, and Resource Constraints Tags: Multi-Agent SystemsMulti-Robot SystemsSignal Temporal LogicVehicle Routing ProblemMixed Integer Linear Programming Read more about Planning for Heterogeneous Teams of Robots with Temporal Logic, Capability, and Resource Constraints
Planning for Modular Aerial Robotic Tools with Temporal Logic Constraints Tags: Formal MethodsSignal Temporal LogicMixed Integer Linear ProgrammingModular RobotsMulti-Robot Systems Read more about Planning for Modular Aerial Robotic Tools with Temporal Logic Constraints
Partial Satisfaction of Signal Temporal Logic Specifications for Coordination of Multi-Robot Systems Tags: Formal MethodsSignal Temporal LogicPartial SatisfactionMixed Integer Linear ProgrammingMulti-Robot Systems Read more about Partial Satisfaction of Signal Temporal Logic Specifications for Coordination of Multi-Robot Systems