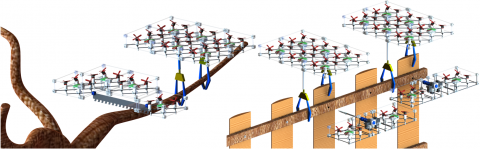
Published date: Wednesday, December 7, 2022Type: ConferencePDF: CDC 2022 Modular Aerial Robotic ToolsBibTex: CDC_2022.bibAbstract Modular robots are highly versatile due to their ability to reconfigure and change their mechanical properties. This ability makes them optimal for scenarios that require different types of tasks. However, task allocation and cooperation become a combinatorial problem when the number of modules increases. To tackle this problem, we propose a high-level planner for reconfigurable robots with heterogeneous capabilities, e.g., aerial motion and tool operation. Modules can attach and detach to create configurations that manipulate tools satisfying temporal and logic-constrained tasks. The mission is specified using Metric Temporal Logic (MTL) which offers the capacity to not only account for where and who needs to satisfy a task but also when and for how long. We model the problem using a Mixed Integer Linear Problem (MILP) approach, capturing cost for reconfiguration, satisfying a task, and motion in the environment in a specific configuration. Additionally, we consider that not all configurations can satisfy every task. We find trajectories for modular robots that guarantee mission satisfaction. Finally, we show the performance in simulations with multiple tasks and requirements in an environment. Tags: Formal MethodsSignal Temporal LogicMixed Integer Linear ProgrammingModular RobotsMulti-Robot Systems