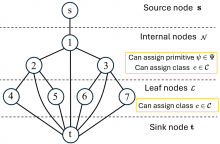
Learning Optimal Signal Temporal Logic Decision Trees for Classification: A Max-Flow MILP Formulation Tags: Temporal Logic InferenceDecision TreesSignal Temporal LogicMixed Integer Linear ProgrammingMachine Learning Read more about Learning Optimal Signal Temporal Logic Decision Trees for Classification: A Max-Flow MILP Formulation
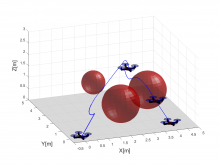
Control Barrier Function for Linearizable Systems with High Relative Degrees from Signal Temporal Logics: A Reference Governor Approach Tags: Control SynthesisSignal Temporal LogicSafetyControl Barrier FunctionReference GovernorGround RoboticsAerial Robotics Read more about Control Barrier Function for Linearizable Systems with High Relative Degrees from Signal Temporal Logics: A Reference Governor Approach
Optimal Control Synthesis with Relaxed Global Temporal Logic Specifications for Homogeneous Multi-robot Teams Tags: Multi-Robot SystemsMulti-Agent SystemsUser PreferencesTemporal RelaxationTime-Window Temporal LogicLinear Temporal LogicMixed Integer Linear ProgrammingAutomata Read more about Optimal Control Synthesis with Relaxed Global Temporal Logic Specifications for Homogeneous Multi-robot Teams
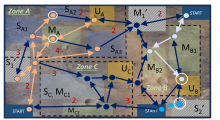
An Iterative Approach for Heterogeneous Multi-Agent Route Planning with Temporal Logic Goals and Travel Duration Uncertainty Tags: Multi-Robot SystemsMulti-Agent SystemsSignal Temporal LogicVehicle Routing ProblemChance-ConstraintsMixed Integer Linear ProgrammingIterative Methods Read more about An Iterative Approach for Heterogeneous Multi-Agent Route Planning with Temporal Logic Goals and Travel Duration Uncertainty
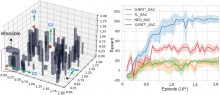
Learning Minimally-Violating Continuous Control for Infeasible Linear Temporal Logic Specifications Tags: Reinforcement LearningLinear Temporal LogicMinimum ViolationSampling-based MethodsMachine LearningAutomata Read more about Learning Minimally-Violating Continuous Control for Infeasible Linear Temporal Logic Specifications
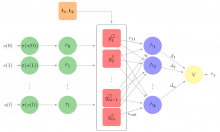
Learning Signal Temporal Logic through Neural Network for Interpretable Classification Tags: Temporal Logic InferenceSignal Temporal LogicWeighted Signal Temporal LogicNeural NetworksMachine Learning Read more about Learning Signal Temporal Logic through Neural Network for Interpretable Classification
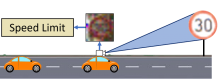
Symbolic Perception Risk in Autonomous Driving Tags: Perception-AwareSymbolic RiskAutonomous Car Read more about Symbolic Perception Risk in Autonomous Driving
Robustness Measures and Monitors for Time Window Temporal Logic Tags: Time-Window Temporal LogicMonitoringRobustness Read more about Robustness Measures and Monitors for Time Window Temporal Logic
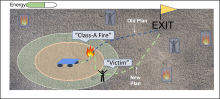
Energy-Constrained Active Exploration Under Incremental-Resolution Symbolic Perception Tags: Control SynthesisActive ExplorationPerception-AwareIncremental Symbolic PerceptionAutomataMixed Integer Linear ProgrammingGround Robotics Read more about Energy-Constrained Active Exploration Under Incremental-Resolution Symbolic Perception
Temporal Logic Swarm Control with Splitting and Merging Tags: Motion and Path PlanningMetric Temporal LogicSwarm RoboticsMulti-Robot SystemsMulti-Agent SystemsAerial Robotics Read more about Temporal Logic Swarm Control with Splitting and Merging