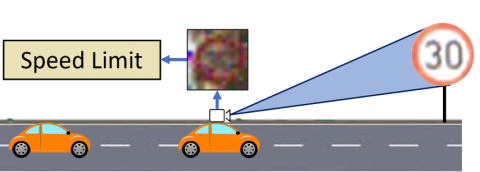
Published date: Thursday, June 1, 2023Type: ConferencePDF: ACC SymRisk 2023BibTex: ACC SymRisk 2023Abstract We develop a novel framework to assess the risk of misperception in a traffic sign classification task in the presence of exogenous noise. We consider the problem in an autonomous driving setting, where visual input quality gradually improves due to improved resolution, and less noise since the distance to traffic signs decreases. Using the estimated perception statistics obtained using the standard classification algorithms, we aim to quantify the risk of misperception to mitigate the effects of imperfect visual observation. By exploring perception outputs, their expected high-level actions, and potential costs, we show the closed-form representation of the conditional value-at-risk (CVaR) of misperception. Several case studies support the effectiveness of our proposed methodology. Tags: Perception-AwareSymbolic RiskAutonomous Car