Generalized Mean Robustness for Signal Temporal Logic Tags: Signal Temporal LogicRobustnessControl Synthesis Read more about Generalized Mean Robustness for Signal Temporal Logic
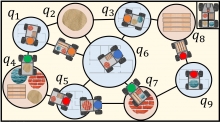
Planning for Heterogeneous Teams of Robots with Temporal Logic, Capability, and Resource Constraints Tags: Multi-Agent SystemsMulti-Robot SystemsSignal Temporal LogicVehicle Routing ProblemMixed Integer Linear Programming Read more about Planning for Heterogeneous Teams of Robots with Temporal Logic, Capability, and Resource Constraints
Overcoming Exploration: Deep Reinforcement Learning for Continuous Control in Cluttered Environments from Temporal Logic Specifications Tags: Reinforcement LearningLinear Temporal LogicSampling-based MethodsMachine LearningAutomata Read more about Overcoming Exploration: Deep Reinforcement Learning for Continuous Control in Cluttered Environments from Temporal Logic Specifications
Scalable and Robust Algorithms for Task-Based Coordination From High-Level Specifications (ScRATCHeS) Tags: Multi-Agent SystemsMulti-Robot SystemsSignal Temporal LogicIntegrated Route and Motion PlanningVehicle Routing ProblemGround RoboticsAerial RoboticsMixed Integer Linear Programming Read more about Scalable and Robust Algorithms for Task-Based Coordination From High-Level Specifications (ScRATCHeS)
Fast Decomposition of Temporal Logic Specifications for Heterogeneous Teams Tags: Multi-Agent SystemsMulti-Robot SystemsVehicle Routing ProblemSatisfiability Modulo TheoriesDecomposition Read more about Fast Decomposition of Temporal Logic Specifications for Heterogeneous Teams
Probabilistic Coordination of Heterogeneous Teams From Capability Temporal Logic Specifications Tags: Multi-Robot SystemsMulti-Agent SystemsSignal Temporal LogicVehicle Routing ProblemChance-ConstraintsMixed Integer Linear Programming Read more about Probabilistic Coordination of Heterogeneous Teams From Capability Temporal Logic Specifications
Learning An Explainable Trajectory Generator Using The Automaton Generative Network (AGN) Tags: Autonomous CarAutomataMachine Learning Read more about Learning An Explainable Trajectory Generator Using The Automaton Generative Network (AGN)
Vehicle Trajectory Prediction Using Generative Adversarial Network With Temporal Logic Syntax Tree Features Tags: Autonomous CarSignal Temporal LogicMachine Learning Read more about Vehicle Trajectory Prediction Using Generative Adversarial Network With Temporal Logic Syntax Tree Features
Specifying User Preferences using Weighted Signal Temporal Logic Tags: Signal Temporal LogicUser PreferencesControl SynthesisModel Predictive ControlMixed Integer Linear Programming Read more about Specifying User Preferences using Weighted Signal Temporal Logic
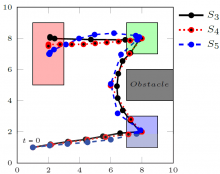
Reactive Sampling-Based Path Planning with Temporal Logic Specifications Tags: Sampling-based MethodsMotion and Path PlanningAutomataLinear Temporal Logic Read more about Reactive Sampling-Based Path Planning with Temporal Logic Specifications